DAO ĐỘNG ĐIỀU HÒA – CON LẮC LÒ XO
Loga.vn
Nội dung cần nắm:
- Nắm bản chất của dao động điều hòa và các thành phần trong nó
- Công thức tổng quát của con lắc lò xo
A/ Lý Thuyết
I ĐẠI CƯƠNG DAO ĐỘNG ĐIỀU HÒA
1. Chu kì, tần số, tần số góc:
Chu kỳ T (s)
- Khoảng thời gian để vật thực hiện được một dao động toàn phần.
- Chu kỳ cũng là khoảng thời gian ngắn nhất mà vật trở về trạng thái cũ (vị trí cũ và vận tốc cũ)
$T=\frac{2\pi }{\omega }=\frac{\Delta t}{N}$(N là số dao động toàn phần thực hiện trong thời gian $\Delta t$)
Tần số f (Hz hay s-1): Số dao động toàn phần thực hiện được trong một giây \[f=\frac{1}{T}=\frac{\omega }{2\pi }=\frac{N}{\Delta t}\]
Tần số góc w (rad/s): \[\omega =\frac{2\pi }{T}=2\pi f\]
2. Dao động:
a. Dao động cơ là:
Chuyển động qua lại quanh một vị trí cân bằng.
b. Dao động tuần hoàn:
Sau những khoảng thời gian bằng nhau (gọi là chu kỳ) vật trở lại vị trí cũ theo hướng cũ.
c. Dao động điều hòa:
là dao động trong đó li độ của vật là một hàm cosin (hay sin) của thời gian.
3. Phương trình dao động điều hòa (li độ):
x = Acos(wt + j)
Trong đó :
- x: Li độ (cm, m)
- A : Li độ cực đại (Biên độ) (cm, m)
- $\omega $: tần số góc (rad/s)
- $\omega t+\phi $: pha dao động (rad) (xác định trạng thái dao động)
- $\phi $: pha ban đầu (tại t = 0, đo bằng rad)
- L = 2A: Chiều dài quỹ đạo.
Mỗi chu kì vật qua vị trí biên 1 lần,qua các vị trí khác 2lần (1lần theo chiều dương và 1lần theo chiều âm)
4. Phương trình vận tốc:
v = - wAsin(wt + j) = wAcos(wt + j+$\frac{\pi }{2}$)
+) $\overrightarrow{v}$ luôn cùng chiều với chiều cđ, vật cđ theo chiều dương thì v > 0, theo chiều âm thì v < 0.
+) v luôn sớm pha $\frac{\pi }{2}$ so với x
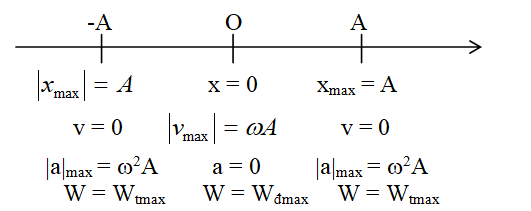
+) Vật ở VTCB ( x = 0): |v|max = wA;
+) Vật ở biên (x = ±A): |v|min = 0;
5. Phương trình gia tốc:
a = -w2Acos(wt + j) = w2Acos(wt + j+\[\pi \]) = -w2x
+) $\overrightarrow{a}$ luôn hướng về vị trí cân bằng;
+) a luôn sớm pha $\frac{\pi }{2}$ so với v
+) a và x luôn ngược pha
+ Vật ở VTCB ( x = 0): |a|min = 0
+ Vật ở biên (x = ±A): |a|max = w2A
6. Công thức độc lập:
${{A}^{2}}={{x}^{2}}+\frac{{{v}^{2}}}{{{\omega }^{2}}}$ và ${{A}^{2}}=\frac{{{v}^{2}}}{{{\omega }^{2}}}+\frac{{{a}^{2}}}{{{\omega }^{4}}}$
+ Kéo vật lệch khỏi VTCB 1 đoạn rồi buông (thả) $\Rightarrow A$
+ Kéo vật lệch khỏi VTCB 1 đoạn rồi truyền v $\Rightarrow x$
7. Phương trình đặc biệt:
x = a ± Acos(wt + φ) với a = const Þ.png)
x = a ± Acos2(wt+φ) với a = const Þ Biên độ:\[\frac{A}{2}\]; w’=2w; φ’= 2φ
8. Đồ thị của dđđh:
- Đồ thị của li độ là đường hình sin, của vận tốc là một đoạn thẳng, của gia tốc là 1 elip
- Đồ thị vận tốc theo li độ và gia tốc theo vận tốc là elip; gia tốc theo li độ là đoạn thẳng
9. Mối liên hệ giữa cđ tròn đều và dđđh:
Dđđh được xem là hình chiếu của một chất điểm chuyển động tròn đều lên một trục nằm trong mặt phẳng quỹ đạo. Với:
\[\Delta t=\frac{\Delta \varphi }{\omega }\]
CON LẮC LÒ XO
Con lắc lò xo: Gồm một vật nhỏ khối lượng m gắn vào đầu lò xo độ cứng k, đầu còn lại của lò xo được giữ cố định, khối lượng lò xo không đáng kể
- Phương trình dđ: x = Acos(wt + j)
- Chu kì, tần số, tần số góc và độ biến dạng:
+ Tần số góc, chu kỳ, tần số: \[\omega =\sqrt{\frac{k}{m}}\]; \[T=2\pi \sqrt{\frac{m}{k}}\]; $f=\frac{1}{2\pi }\sqrt{\frac{k}{m}}$
+ k = m${{\omega }^{2}}$Chú ý: 1N/cm = 100N/m
+ Nếu lò xo treo thẳng đứng: $T=2\pi \sqrt{\frac{m}{k}}=2\pi \sqrt{\frac{\Delta {{l}_{0}}}{g}}$ Với $\Delta {{l}_{0}}=\frac{mg}{k}$
Nhận xét: Chu kì của con lắc lò xo
+ tỉ lệ thuận căn bậc 2 của m; tỉ lệ nghịch căn bậc 2 của k
+ chỉ phụ thuộc vào m và k; không phụ thuộc vào A (sự kích thích ban đầu)
- Tỉ số chu kì, khối lượng và số dao động: \[\frac{{{T}_{2}}}{{{T}_{1}}}=\sqrt{\frac{{{m}_{2}}}{{{m}_{1}}}}=\frac{n_{1}^{{}}}{n_{2}^{{}}}=\sqrt{\frac{{{k}_{1}}}{{{k}_{2}}}}\]
4. Chu kì và sự thay đổi khối lượng: Gắn lò xo k vào vật m1 được chu kỳ T1, vào vật m2 được T2, vào vật khối lượng m1 + m2 được chu kỳ T3, vào vật khối lượng m1 – m2 (m1 > m2) được chu kỳ T4.
Thì ta có: $T_{3}^{2}=T_{1}^{2}+T_{2}^{2}$ và $T_{4}^{2}=T_{1}^{2}-T_{2}^{2}$
- Năng lượng trong dao động điều hòa của CLLX
- Thế năng: ${{W}_{t}}=\frac{1}{2}k{{x}^{2}}=\frac{1}{2}m{{\omega }^{2}}{{x}^{2}}=\frac{1}{2}m{{\omega }^{2}}{{A}^{2}}{{\cos }^{2}}(\omega t+\phi )$
- Động năng: ${{W}_{}}=\frac{1}{2}m{{v}^{2}}=\frac{1}{2}m{{\omega }^{2}}{{A}^{2}}{{\sin }^{2}}(\omega t+\phi )$
- Cơ năng: $W={{W}_{t}}+{{W}_{d}}=\frac{1}{2}k{{A}^{2}}=\frac{1}{2}m{{\omega }^{2}}{{A}^{2}}=const$
Nhận xét:
+ Cơ năng được bảo toàn và tỉ lệ với bình phương biên độ.
+ Vị trí thế năng cực đại thì động năng cực tiểu và ngược lại.
+ Thời gian để động năng bằng thế năng là: $t=\frac{T}{4}$
+ Thời gian 2 lần liên tiếp động năng hoặc thế năng bằng không là: $\frac{T}{2}$
+ Dđđh có tần số góc là w, tần số f, chu kỳ T. Thì động năng và thế năng biến thiên với tần số góc 2w, tần số 2f, chu kỳ T/2.
Công thức xác định x và v liên quan đến mối liên hệ giữa động năng và thế năng:
a. Khi ${{W}_{}}=n{{W}_{t}}\Rightarrow x=\pm \frac{A}{\sqrt{n+1}}$
b. Khi ${{W}_{t}}=n{{W}_{}}\Rightarrow v=\pm \frac{\omega A}{\sqrt{n+1}}$
5. Lực hồi phục (lực kéo về): là nguyên nhân làm cho vật dao động, luôn hướng về vị trí cân bằng và biến thiên điều hòa cùng tần số với li độ & vật đổi chiều khi lực hồi phụcđạt giá trị cực đại.
Fhp = - kx = $-m{{\omega }^{2}}x$
(Fhpmin = 0 tại VTCB; Fhpmax = kA tại vị trí biên)
6. Lực đàn hồi: xuất hiện khi lò xo bị biến dạng và đưa vật về vị trí lò xo không bị biến dạng.
\[F=k\left| \Delta l+x \right|\]
- CLLX nằm ngang $\Delta l$=0
- CLLX thẳng đứng: \[\Delta l=\frac{mg}{k}\]
- CLLX trên mặt phẳng nghiêng: \[\Delta l=\frac{mg\sin \alpha }{k}\]
- Lực đàn hồi cực đại – cực tiểu:
+ Fđhmax = k($\Delta {{l}_{0}}$+A) : Biên dưới: ở vị trí thấp nhất
+ ${{F}_{h\min }}=\left| \begin{align}
& 0;khi\Delta {{l}_{0}}\le A \\
& k(\Delta {{l}_{0}}-A);khi\Delta {{l}_{0}}>A \\
\end{align} \right.$$$
7. Chiều dài lò xo:
- Chiều dài của CLLX khi có li độ x: \[l={{l}_{0}}+\Delta l+x={{l}_{CB}}+x\]
Nếu CLLX nằm ngang: \[{{l}_{CB}}={{l}_{0}}\]
Nếu CLLX thẳng đứng \[{{l}_{CB}}={{l}_{0}}\pm \Delta l\] Dấu + khi LX treo thẳng đứng, dấu – khi LX đặt thẳng đứng
+ Chiều dài cực đại (ở vị trí thấp nhất): lmax = lcb + A
+ Chiều dài cực tiểu (ở vị trí cao nhất): lmin = lcb – A
+ Chiều dài lò xo tại vị trí cân bằng: ${{l}_{cb}}={{l}_{0}}+\Delta {{l}_{0}}=\frac{{{l}_{\max }}+{{l}_{\min }}}{2}$ ; $\Delta {{l}_{0}}=\frac{mg}{k}=\frac{g}{{{\omega }^{2}}}$
B/ Bài tập tự luyện
I.1. Chọn câu đúng. Dao động điều hoà là dao động có:
A. Li độ được mô tả bằng định luật dạng sin (hay cosin) theo thời gian.
B. Vận tốc của vật biến thiên theo hàm bậc nhất đối với thời gian.
C. Sự chuyển hoá qua lại giữa thế năng và động năng nhưng cơ năng luôn luôn bảo toàn.
D. A và C đúng.
I.2. Chọn câu đúng. Chu kỳ của dao động tuần hoàn là
A. khoảng thời gian mà trạng thái dao động được lặp lại như cũ.
B. khoảng thời gian ngắn nhất mà trạng thái dao động được lặp lại như cũ.
C. khoảng thời gian vật thực hiện dao động. D. B và C đều đúng
I.3. Chọn câu đúng. Chu kỳ dao động của con lắc lò xo là:
A. \[T=2\pi \sqrt{\frac{k}{m}}\] B. \[T=\frac{1}{2\pi }\sqrt{\frac{m}{k}}\] C. \[T=2\pi \sqrt{\frac{m}{k}}\] D. \[T=\frac{1}{2\pi }\sqrt{\frac{k}{m}}\]
I.4. Chọn câu đúng. Một vật thực hiện đồng thời hai dao động điều hoà có phương trình dao động: \[{{x}_{1}}={{A}_{1}}\sin (\omega t+{{\varphi }_{1}})\] và \[{{x}_{2}}={{A}_{2}}\sin (\omega t+{{\varphi }_{2}})\] thì biên độ dao động tổng hợp là:
A. A = A1 + A2 nếu hai dao động cùng pha B. A = \[\left| {{A}_{1}}-{{A}_{2}} \right|\] nếu hai dao động ngược pha
C. \[\left| {{A}_{1}}-{{A}_{2}} \right|\] < A < A1 + A2 nếu hai dao động có độ lệch pha bất kỳ. D. A, B, C đều đúng.
I.5. Chọn câu đúng. Dao động của con lắc đơn được xem là dao động điều hoà khi:
A. Chu kỳ dao động không đổi B. Biên độ dao động nhỏ.
C. Khi không có ma sát. D. Không có ma sát và dao động với biên độ nhỏ.
I.6. Chọn câu đúng. Dao động tự do là dao động có:
A. Tần số không đổi. B. Biên độ không đổi. C. Tần số và biên độ không đổi.
D. Tần số chỉ phụ thuộc vào các đặc tính của hệ và không phụ thuộc các yếu tố bên ngoài.
I.7. Chọn câu đúng. Trong dao động điều hoà giá trị gia tốc của vật:
A. Tăng khi giá trị vận tốc của vật tăng. B. Giảm khi giá trị vận tốc của vật tăng.
C. Không thay đổi. D. Tăng hay giảm tuỳ thuộc vào giá trị vận tốc đầu của vật lớn hay nhỏ.
I.8. Chọn câu đúng. Trong phương trình dao động điều hoà $x=A\sin (\omega t+\varphi )$, các đại lượng $\omega ,\varphi ,\omega t+\varphi $là những đại lượng trung gian cho phép xác định:
A. Ly độ và pha ban đầu B. Biên độ và trạng thái dao động. C. Tần số và pha dao động. D. Tần số và trạng thái dao động.
I.9. Chọn câu đúng. Trong quá trình dao động, năng lượng của hệ dao động điều hoà biến đổi như sau:
A. Thế năng của hệ dao động giảm khi động năng tăng và ngược lại.
B. Cơ năng của hệ dao động là hằng số và tỷ lệ với biên độ dao động.
C. Năng lượng của hệ được bảo toàn. Cơ năng của hệ giảm bao nhiêu thì nội năng tăng bấy nhiêu.
D. Năng lượng của hệ dao động nhận được từ bên ngoài trong mỗi chu kỳ đúng bằng phần cơ năng của hệ bị giảm do sinh công để thắng lực cản.
I.10. Cho dao động điều hoà có phương trình dao động: $x=A\sin (\omega t+\varphi )$ trong đó A, $\omega ,\varphi $là các hằng số. Chọn câu đúng trong các câu sau:
A. Đại lượng $\varphi $gọi là pha dao động.
B. Biên độ A không phụ thuộc vào $\omega $ và $\varphi $, nó chỉ phụ thuộc vào tác dụng của ngoại lực kích thích ban đầu lên hệ dao động.
C. Đại lượng $\omega $ gọi là tần số dao động, $\omega $ không phụ thuộc vào các đặc điểm của hệ dao động.
D. Chu kỳ dao động được tính bởi T = 2pw.
Chúc các bạn học tốt! Ng.M.N